支持CAN功能
1.使能设备树CAN节点
在t113-i开发板的设备树中,CAN的设备树节点不叫can,名称是awlink。
进入t113i_tinasdk5.0-v1/device/config/chips/t113_i/configs/evb1_auto/linux-5.4/board.dts
ubuntu@dshanpi:~/meihao/t113i_tinasdk5.0-v1/device/config/chips/t113_i/configs/evb1_auto/linux-5.4$ vim board.dts
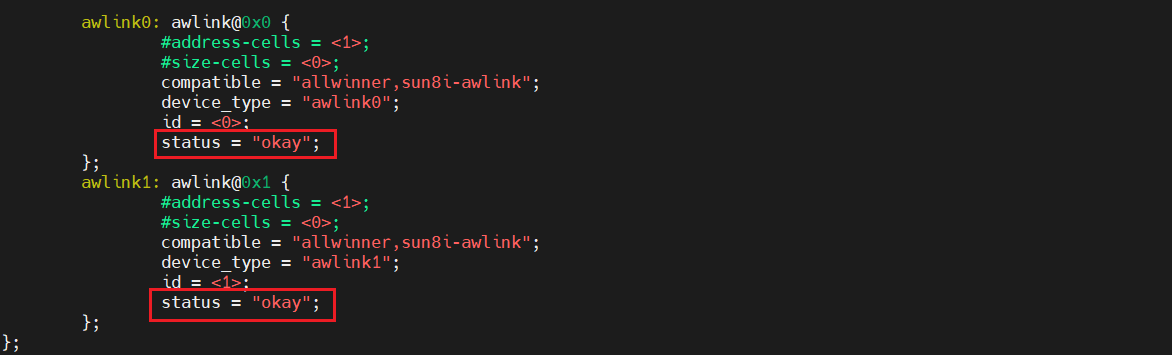
使能awlink0和awlink1,默认处于使能状态。
2.配置内核驱动
�进入SDK源码根目录t113i_tinasdk5.0-v1/
执行./build.sh menuconfig,打开内核配置界面。
点击键盘上的/键,搜索awlink
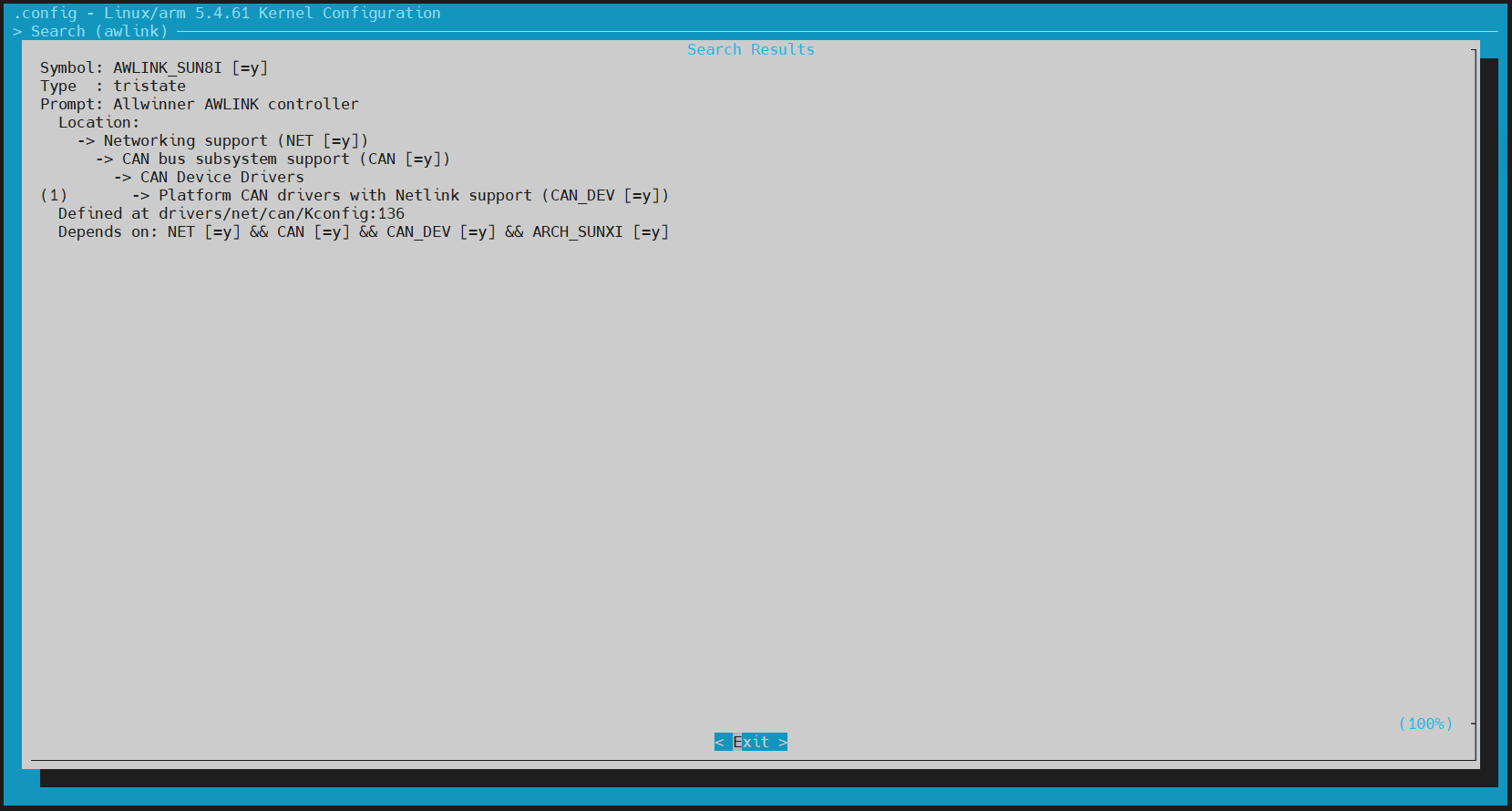
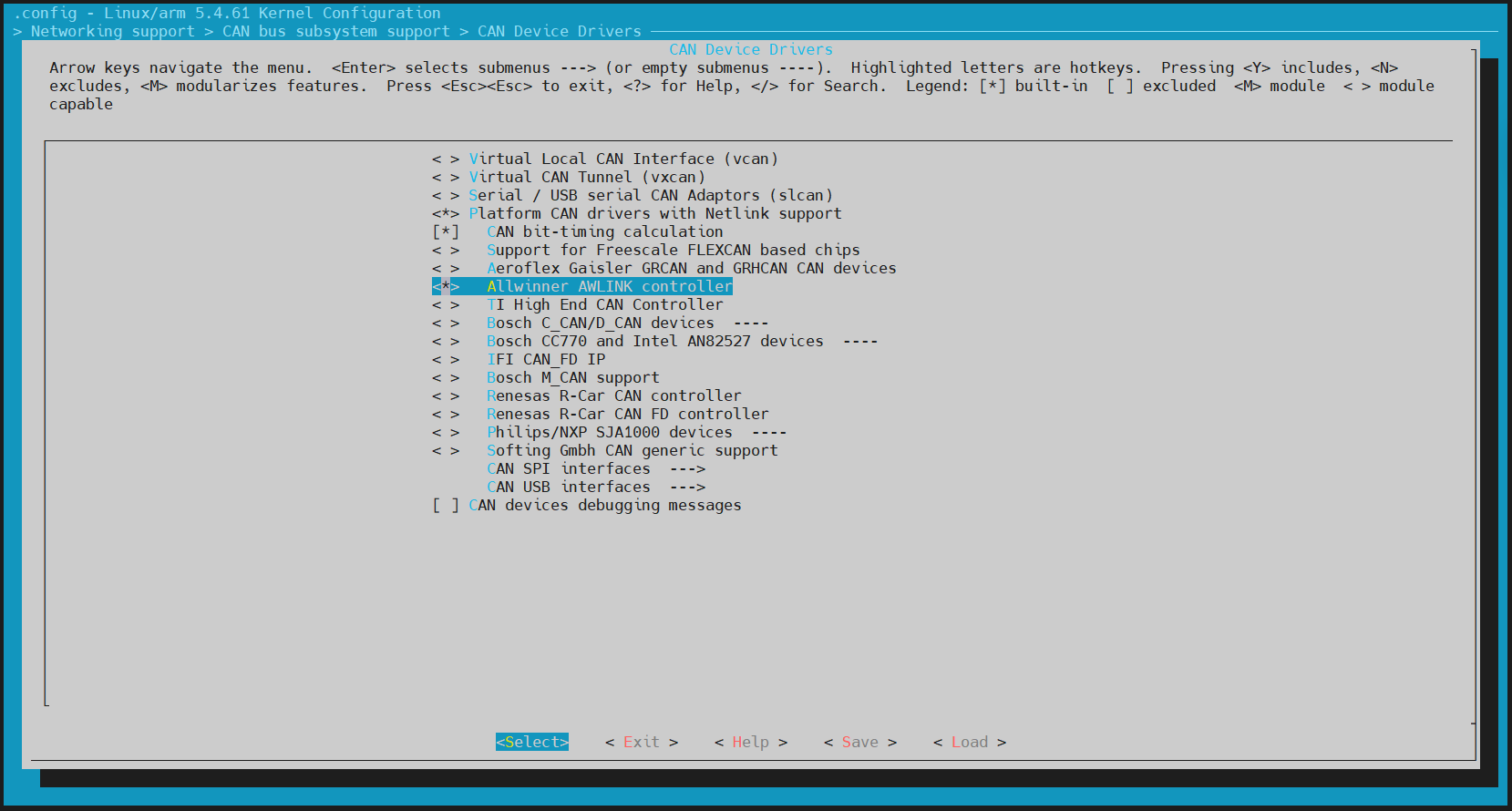
根据路径,找到Allwinner AWLINK controller选项。
选择Networking support,点击enter键进入。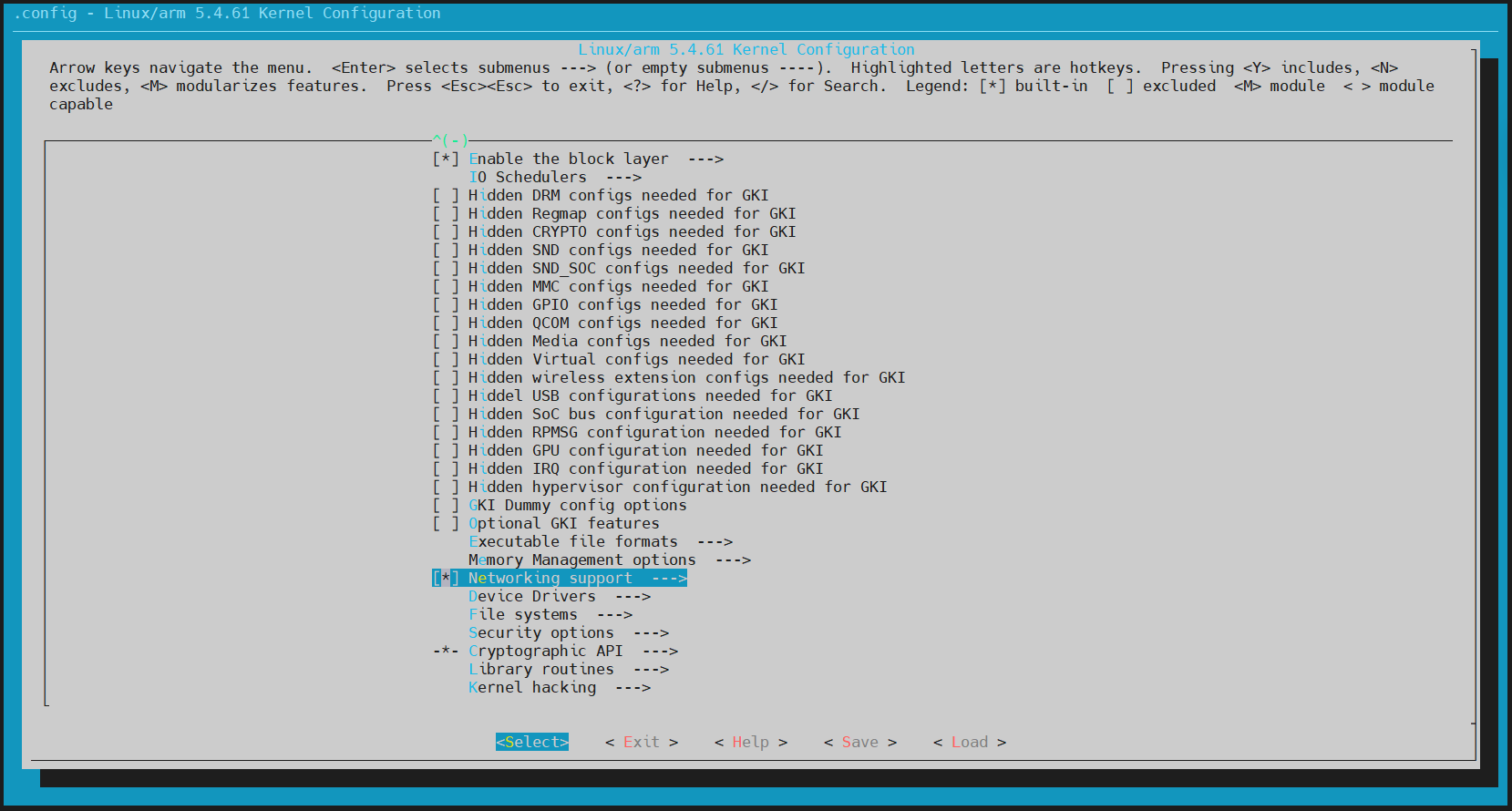
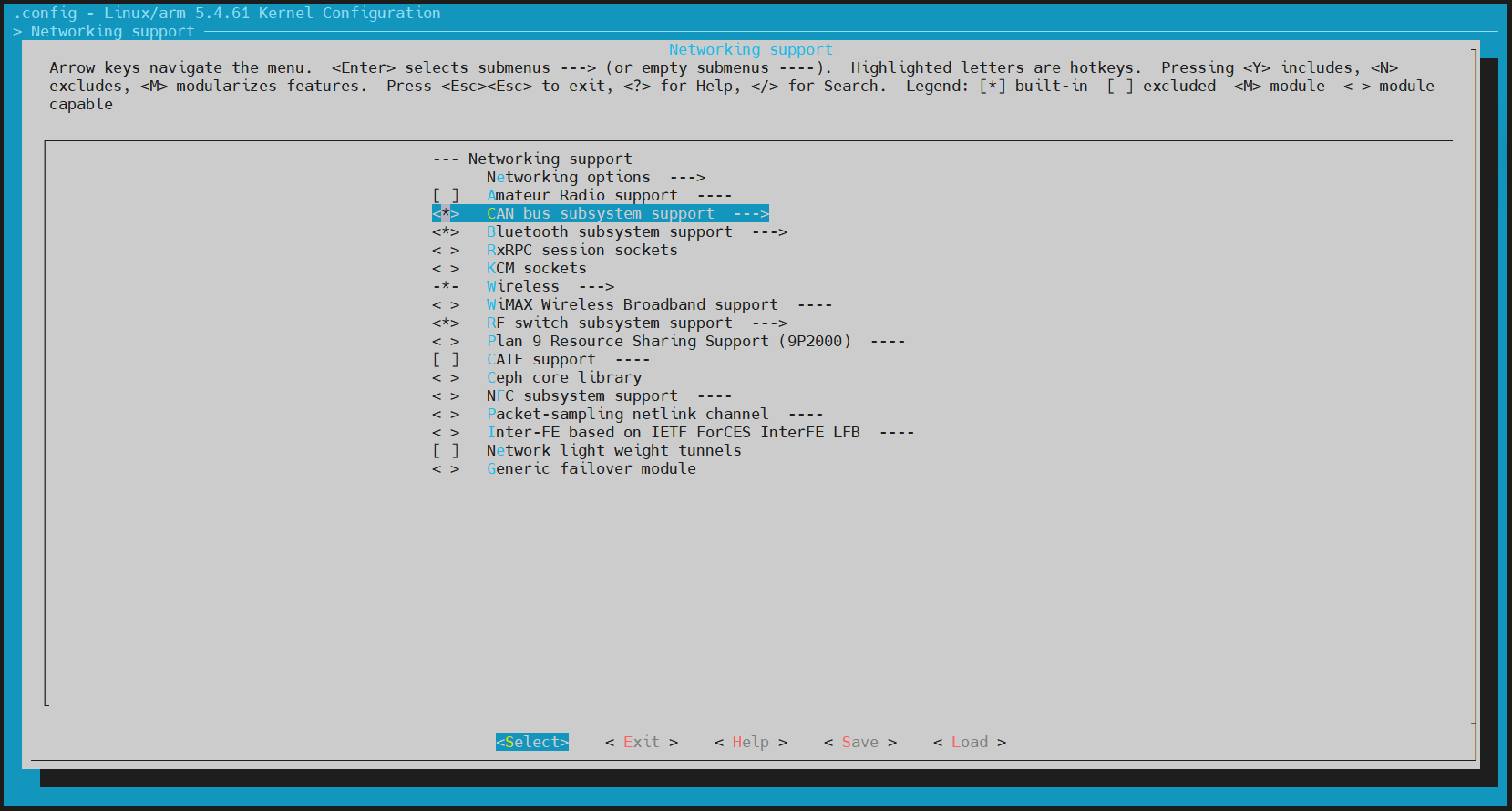
找到CAN bus subsystem support,点击enter键进入。
之后,找到CAN Device Drivers,点击enter键进入。
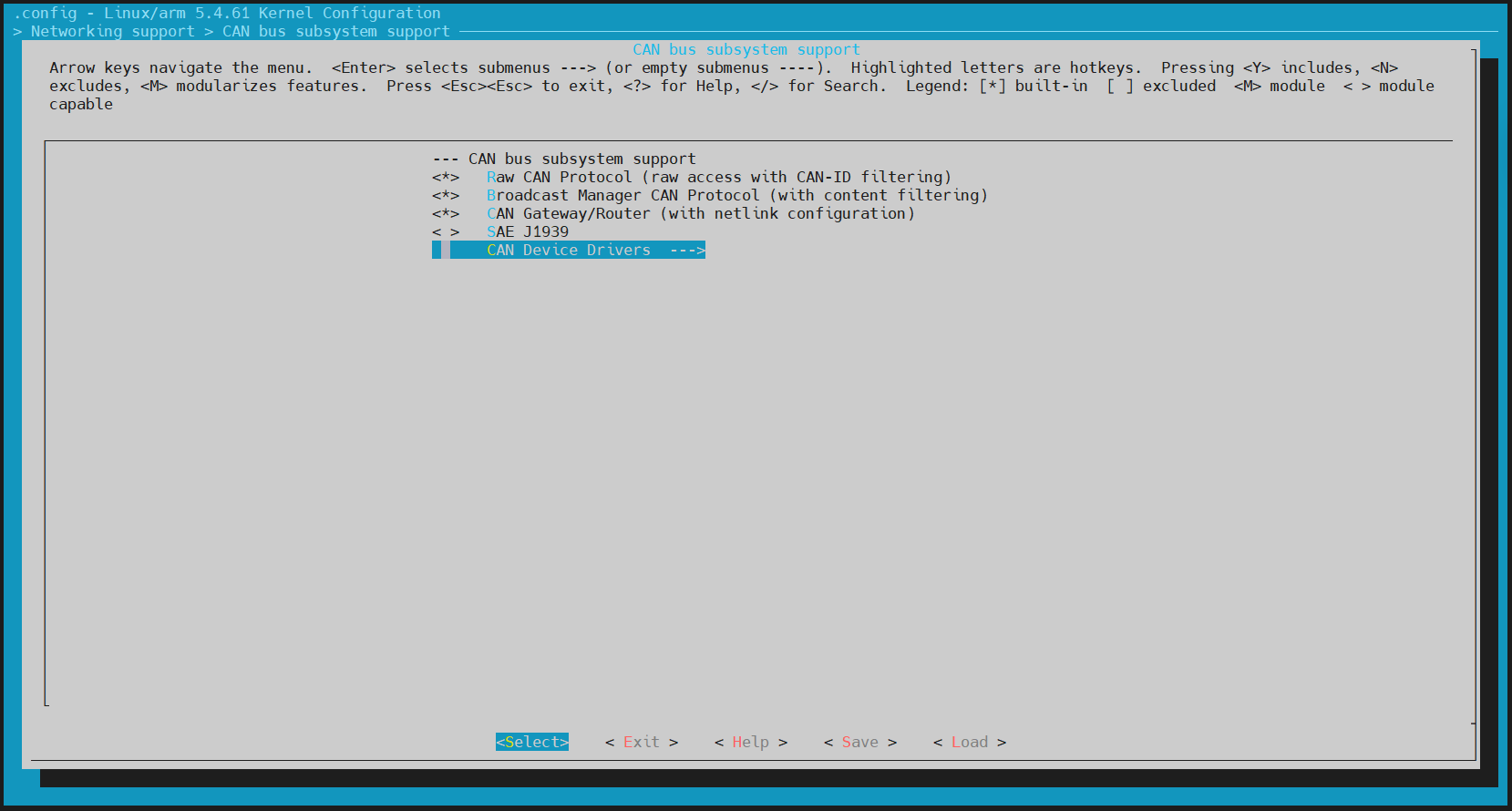
找到Allwinner AWLINK controller,点击键盘上的y键选上。
最后保存,退出。
在SDK源码根目录t113i_tinasdk5.0-v1/下,执行./build.sh kernel编译内核,再执行./build.sh ,最后打包./build.sh pack。
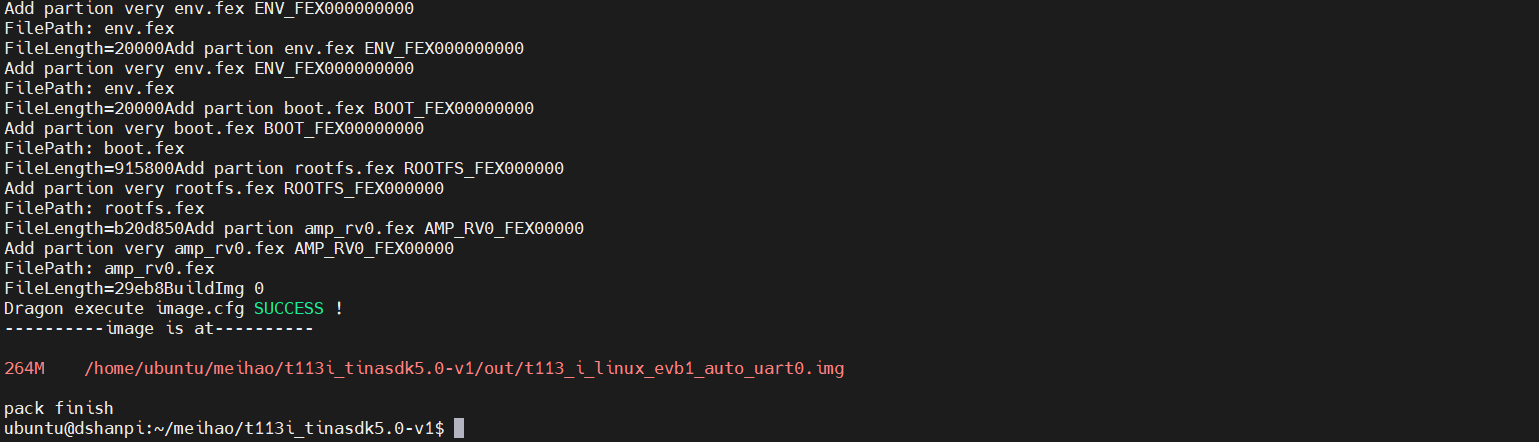
打包完成后,根据之前的烧录方式,烧录到开�发板上。
3.测试CAN功能
烧录完成后,进入开发板。
在开发板上,执行ifconfig -a,查看是否存在awlink0和awlink1。
# ifconfig -a
awlink0 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
NOARP MTU:16 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:10
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
awlink1 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
NOARP MTU:16 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:10
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
Interrupt:1
eth0 Link encap:Ethernet HWaddr 42:5A:1A:01:32:43
BROADCAST MULTICAST MTU:1500 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
Interrupt:40
ip6tnl0 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
NOARP MTU:1452 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
lo Link encap:Local Loopback
inet addr:127.0.0.1 Mask:255.0.0.0
inet6 addr: ::1/128 Scope:Host
UP LOOPBACK RUNNING MTU:65536 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
sit0 Link encap:IPv6-in-IPv4
NOARP MTU:1480 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
#
可以看到,通过ifconfig命令查看CAN接口功能为正常,下面进行CAN功能的收发测试。
测试之前,先使用两根杜邦线,一根将 CAN0 L 连接至 CAN1 L,另一根将 CAN0 H连接 CAN1 H。
连接如下图:
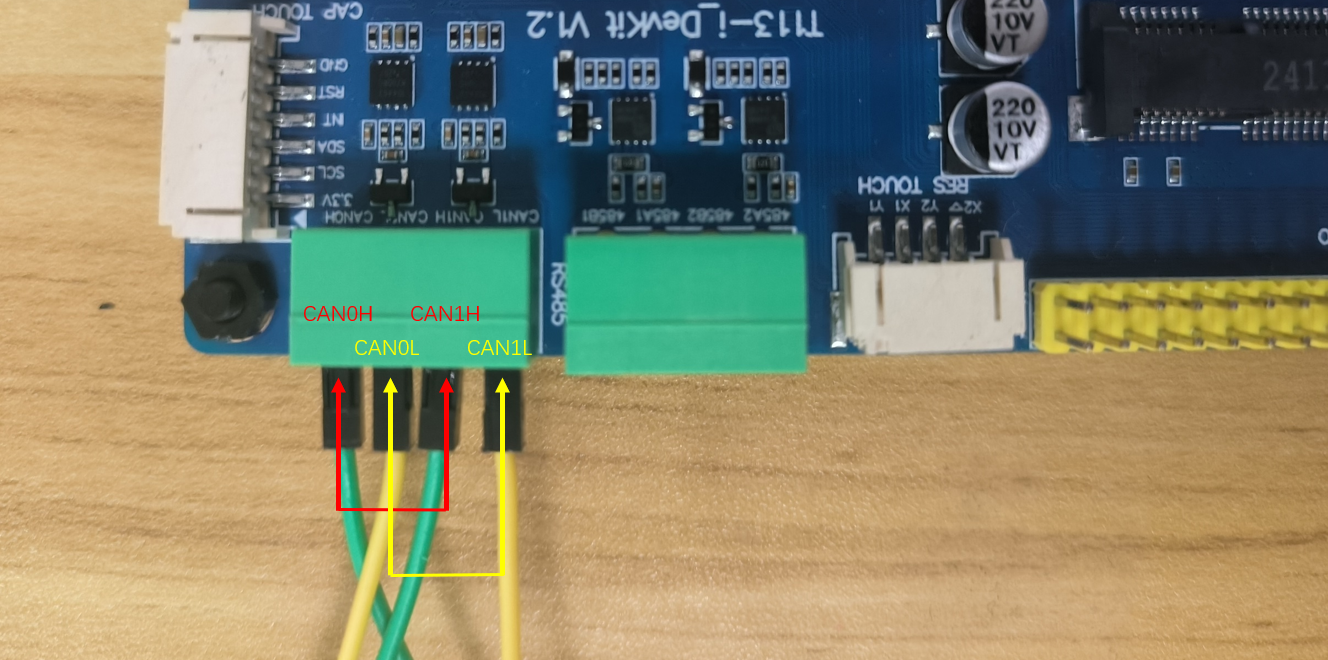
连接好线后,做以下几个步骤进行测试。
①使用ip命令设置awlink接口的速度为500Kb/s
注意:需要设置完成awlink接口速度才能使能awlink接口!!!
# ip link set awlink0 type can bitrate 500000
# ip link set awlink1 type can bitrate 500000
②打开awlink网卡
# ifconfig awlink0 up
[ 1105.138598] IPv6: ADDRCONF(NETDEV_CHANGE): awlink0: link becomes ready
# ifconfig awlink1 up
[ 1106.368692] IPv6: ADDRCONF(NETDEV_CHANGE): awlink1: link becomes ready
#
③设置awlink0接收数据
# candump awlink0 &
[1] 1386
④向awlink0发送数据
# cansend awlink0 5A1#11.22.33.44.55.66.77.88
awlink0 5A1 [8] 11 22 33 44 55 66 77 88
上述cansend命令中,“5A1”是帧ID,“#”后面的“11.22.33.44.55.66.77.88”是要发送的数据,十六进制。CAN2.0一次最多发送8个字节的数据,8字节数据之间用“.”隔开,can-utils会对数据进行解析。